
Mașinile autonome fără internet: autonomie reală sau vulnerabilitate strategică?
Dependența invizibilă
În percepția publică, mașina autonomă este asociată cu conectivitate permanentă și procesare în cloud. Realitatea tehnică este mai nuanțată. Arhitectura unui sistem autonom include patru componente distincte: vehiculul, rețeaua de comunicații, infrastructura urbană și serviciile cloud.
Întrebarea relevantă nu este dacă internetul cade, ci ce rămâne funcțional atunci când cade. Reziliența unui ecosistem autonom nu se măsoară în condiții ideale, ci în scenarii de degradare controlată.
1. Poate funcționa o mașină autonomă fără internet?
Răspunsul tehnic este afirmativ, cu limite operaționale clare.
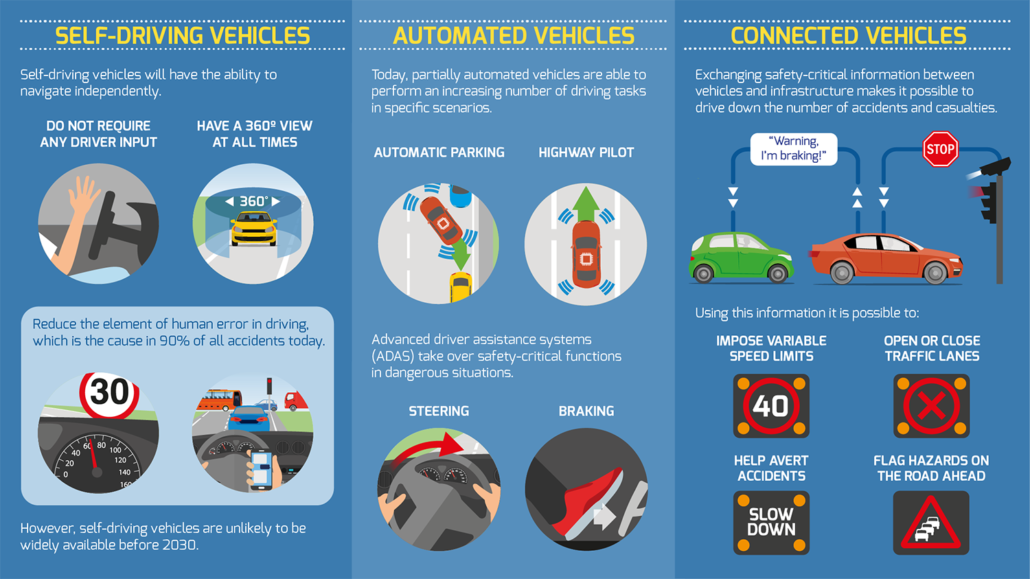
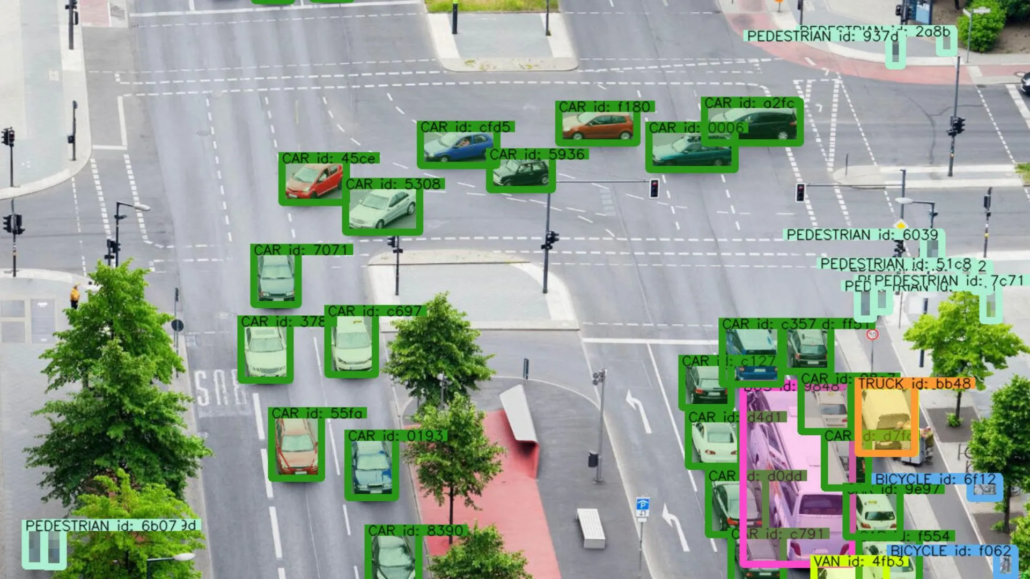
Vehiculele autonome moderne sunt construite pe principiul „edge computing pentru conducere, cloud pentru optimizare”. Procesul de percepție și decizie are loc local, prin:
- radar, camere și LiDAR
- unități de procesare onboard de mare performanță
- hărți HD stocate local
- localizare GNSS și senzori inerțiali
Conectivitatea este utilizată pentru:
- actualizări software OTA
- date de trafic în timp real
- coordonare flotă, în cazul robotaxi
- comunicații V2X
Funcția de conducere propriu-zisă nu poate depinde de internet. Altfel, certificarea conform cadrului UNECE ar fi imposibilă. Standardele pentru Automated Lane Keeping Systems și sisteme de nivel superior impun funcționare autonomă în lipsa conectivității.
2. Ce se întâmplă când dispare conectivitatea?
Pierdere temporară
Vehiculul continuă să opereze normal, dar pierde accesul la date live. Nu mai primește informații despre incidente rutiere sau optimizare de rută, însă controlul dinamic al vehiculului rămâne activ.
Cădere regională majoră
Într-un scenariu extins:
- robotaxi-urile nu mai pot fi coordonate central
- centrele remote nu pot interveni
- sistemele V2X devin inactive
- semaforizarea inteligentă poate reveni la ciclu fix
Vehiculul nu devine incontrolabil. Însă ecosistemul urban pierde stratul de optimizare. Rezultatul probabil este congestie, nu colaps tehnic.
3.Vulnerabilități într-un ecosistem Smart City
Într-un oraș puternic digitalizat, vulnerabilitatea nu este la nivelul vehiculului individual, ci la nivel sistemic.
Semaforizare inteligentă. Fără conectivitate, intersecțiile pot reveni la programe fixe. Capacitatea de adaptare în timp real dispare.
Actualizări de securitate. Lipsa OTA prelungește expunerea la vulnerabilități cunoscute.
Supraveghere remote. În absența legăturii cu centrul de control, vehiculul trebuie să intre în stare de siguranță autonomă.
Comportamentul utilizatorului. Supraîncrederea în sistem poate întârzia reacția umană în mod fallback.
Problema nu este tehnologia în sine, ci integrarea ei într-un ecosistem dependent de rețea fără redundanță.
4.Minimal Risk Condition. Ce impun reglementările
Reglementările internaționale cer ca orice sistem autonom să poată atinge o „Minimal Risk Condition”. Aceasta presupune:
- reducerea controlată a vitezei
- menținerea stabilității direcționale
- oprire într-o zonă sigură
- activarea luminilor de avarie
- notificarea utilizatorului sau a operatorului
Scenariul realist într-un blackout telecom nu este pierderea controlului, ci opriri multiple și creșterea congestiei. Sistemele bine proiectate degradează progresiv, nu cedează brusc.
Implicații pentru România
Pentru România, provocarea nu este adoptarea rapidă a mobilității autonome, ci adoptarea corectă.
O infrastructură robustă presupune:
- arhitectură edge-first pentru funcțiile critice
- redundanță telecom pe infrastructura urbană
- separarea rețelelor critice de cele publice
- testarea periodică a scenariilor de blackout în centre dedicate
Fără aceste elemente, digitalizarea urbană poate deveni un factor de risc operațional.
Concluzie
Autonomia nu este vulnerabilă pentru că utilizează internetul. Devine vulnerabilă atunci când este proiectată să depindă de el pentru funcții critice.
Diferența dintre un sistem robust și unul fragil nu este dată de complexitate, ci de capacitatea de a funcționa independent și de a degrada controlat.
Aceasta este miza tehnică a următorului deceniu în mobilitatea autonomă.
Disclaimer
Acest articol reflectă o analiză tehnică și strategică asupra arhitecturii vehiculelor autonome și a infrastructurii digitale asociate. Informațiile prezentate au caracter informativ și nu reprezintă consultanță tehnică, juridică sau investițională.
Opiniile exprimate aparțin autorului și se bazează pe date publice, standarde internaționale și tendințe actuale din industrie. Ele pot evolua în funcție de modificări legislative, progres tehnologic sau actualizări ale cadrului de reglementare.
- Mircea Lucescu. Despre rigoare, construcție și căutarea neobosită a perfecțiunii
- Criza energetică și viitorul mobilității
- Autonomia auto: între promisiune tehnologică și vulnerabilitate sistemică
- Poate un hacker să provoace un accident în masă într-un oraș autonom?
- Cum ar trebui omologate vehiculele autonome într-o eră a atacurilor cibernetice

Recent impressions